
�������: 1-15 ���鵽����ѧ���� ����������ؼ�¼246�� . ��ѯʱ��(0.193 ��)
�Ϻ�ϵͳ���ڱ�Ĥӫ���������о�����ȡ�ý�չ
��Ĥ ӫ�����
2024/4/11
2024��4��9�գ��й���ѧԺ�Ϻ�ϵͳ����Ϣ�����о����о���Ա�ڱ�Ĥӫ���������о�����ȡ�ý�չ�����о�Ϊ�Ʊ�����ı�Ĥӫ���������ṩ����Ч���ԣ���ӫ������������������Эͬ���̽�����ʵ����֤�����ۼ�����͡���سɹ���Fluorophor embedded MOFs steering gas ultra-recognitionΪ�⣬�����ڡ��Ƚ����ܲ��ϡ���Advanced Functional Ma...
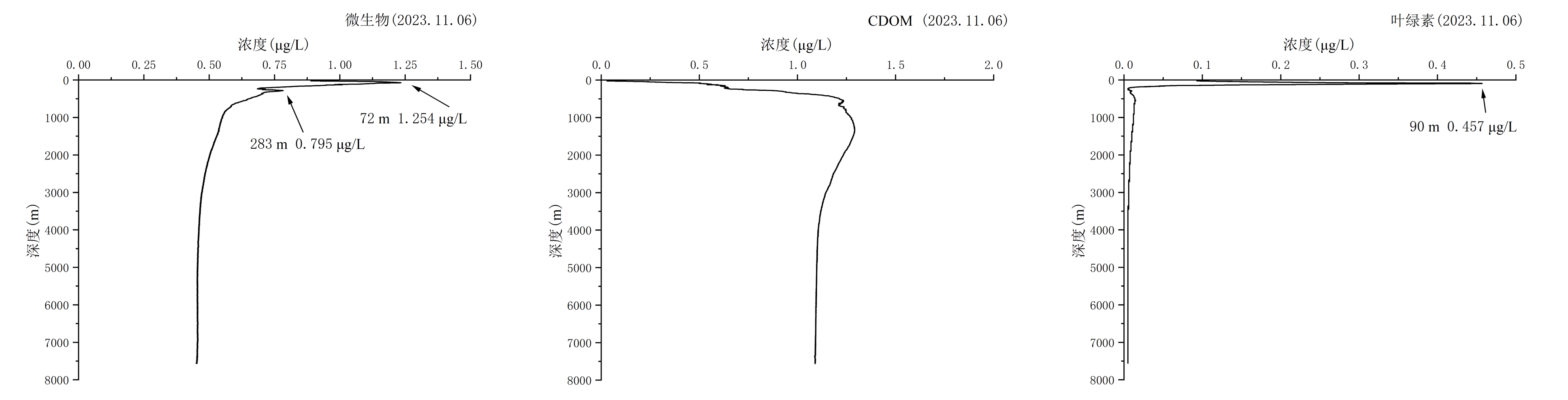
2024��1��29�գ����й���ѧԺ������ѧ�����о�������������ѧ�о����ͷ��������о��飨105�飩������о�Ա�����Ƿ��о�Ա�Ŷ����Ƶĵ�/˫ͨ��ȫ����11,000��ԭλ�����ɫ�ܽ��л��CDOM����Ҷ����ӫ������������2023��10��28����2024��1��12����̽��һ�ŷ��ɱ��������ƿ������д����й���ѧԺ���ѧ�빤���о�������Ԩԭλ��ѧʵ��վ���ڷ��ɱ�������չ���ԣ�������5�κ�������...

�綯���������ܵ����������г������˹�ҵӦ�õĿ��ٷ�չ���Ը߾��ȵĵ�������������˸���Ҫ���봫ͳ������������ȣ���������ЧӦ������װ�ÿ�����������̬�ٿؼ�������߲����ľ��ȡ���Щ����ʹ�û�������ЧӦ�ĵ����������ڸ���Ӧ���о��й㷺��Ӧ��ǰ����
�����������ŬE�Ŷ�AMһ�����ڿɴ������ӵ�����ǿ��ˮ��������������ͼ��
�ŬE �������� ˮ�����Ӵ����� ������
2023/7/18
���ڹ���ˮ�������Ĺ��ܻ����ײ��ϼ�ȱ����Ч�İ��ƣ�������Լ������������ˮ��ЧӦ�ڿɴ����������������Ӧ�á��ڲ���������ͨ���ṹ�ͱ��湦�����Ե�ǰ���£��������ˮ�������Ļ�еǿ�Ⱥ�����������ɴ���������ʵ��ˮ��ЧӦ�ڿɴ�����������㷺Ӧ�������ٵ��ش���ս֮һ����һ���棬���ھ��н���˫�������ͨ����ˮ�������ڲ���֮���������������DZ����Ȼ��Ŀǰ�о����۽���ˮ���������ܵ�������ˮ����������ȴ��...

��ɽ��ѧ�ɹ����Ƴ�����15��ǻ�ij��������ȹ�ѧ�������������У�ͼ��
��ɽ��ѧ ǻ ���������� ��ѧ ���������� ���� Nature Communications
2023/10/13
���գ���ɽ��ѧ��������Ϣ����ѧԺ������ѧԺ�����㶫ʡ�����Ϣ����оƬ��ϵͳ�ص�ʵ������ͽ��ڡ����ֳɸ�����������о��Ŷӻ�����ϵ�ɼӹ�ƽ̨���ɹ����Ƴ��˰���15��ǻ�ij��������ȹ�ѧ�������������У����ں�����ͨ���㷨���ֹ�Ƶ�Ἴ������չ������ϵƬ�����������ṹ�IJ����źŽ�������������������о����о��ɹ������ڹ�ѧ�������֪���ڿ�Nature Communications�ϡ�

�й���ѧԺ�뵼���о������ϵͳʵ���ҿ��гɹ��������ȹ�������������ͼ��
�й���ѧԺ�뵼���о������ϵͳʵ���� ���гɹ� �������ȹ���������
2022/10/5
��ϵͳ�������������Ƚ��Ĺ�������Ԫ���D�D���˼�������Ϊ����Ԫ���������������Ʒ�װ�������ɹ�ʵ����С�����װ���߿ɿ��ԡ��������ȵĹ��˼�������������ϵͳ���ϵͳ���ø߾��Ȳ������ϵͳ�����еĽ���ֱ��ʿ��Դﵽ10-6pm��ˮƽ���ӹ������ȵ�λ��ģʽʶ��ϵͳ���û���С���任��SVM������ʵ�ֶ��źŵķ�����ʶ�𣬱��ɹ�ʵ�ֻ���ȥ�롢������š���Ա�복��ʶ��Ŀ�궨λʹ�ü�����ʵ����95�����ϵ�ʶ����...
��ǰ����������Ӧ��ѧ�ĺ��ļ���֮һ��������Ӧ��ѧϵͳ�У���Ҫʵʱ������ⳡ�IJ�ǰ������о�ȷ�����������������ʵʱУ����ʵ�ָ߷ֱ�����õIJ�ǰ���������Ŀ�-��������ǰ�����������������������и����ǣ������ֲ�ǰ������������ֻ�����ڵ��Դ����µIJ�ǰ�������ڴ��������£���Ҫ����۲������������չ���壬���ǵ��Դ����Դ��۲ⳡ�����ǵ��Դͬʱ����Ҫ��ǰ���������⣬���н�������������������Դ����...

�Ϸʹ�ҵ��ѧ����ѧԺ���������������������ȡ���½�չ��ͼ��
�Ϸʹ�ҵ��ѧ����ѧԺ ��������������� ����������
2023/1/5
���գ��Ϸʹ�ҵ��ѧ����ѧԺ�Ƚ��뵼���������缯��ʵ�������ֱ����������һ���µľ��м��ṹ�IJ���������������������������ͬ�ı��Ա�Ф�ػ�����̽������ɣ�ͼ1a�������ݼ����������Ƽ�����TCAD��ģ�⣬���ڹ������ϵ��������Ⲩ�����������ԣ����ֹ��̽�����ڲ�ͬ���������µĹ������ʴ��ھ���죨ͼ1b�������ֹ������ʹ�����������Ĺ�������벨��֮����ڵ���������ϵ��ͨ���ú������Զ����������...

�й������ѧ����ѧԺ��������Ŷ����ƶ���¹ڲ���������������������ͼ��
�й������ѧ����ѧԺ ���� �¹ڲ��� ������ ���ﴫ����
2021/9/11
�й������ѧ����ѧԺ��������о��Ŷ����¹ڲ�������������ȡ��ͻ���Խ�չ���о��ɹ��ֱ�����Ϊ��Rapid and quantitative detection of SARS-CoV-2 IgG antibody in serum using optofluidic point-of-care testing fluorescence biosensor������Rapid, label-free, ...
�ڷ��ʽ��դ��λ���������Ľṹ�У�������ͨ������������ƹ�դ�������ɶȣ��Ӷ�ʹ��������һ���ķ����������õ��ɶԻ���ʩ��ѹ������ͨ���������������դ�ϵĵ�����ɿ��Ӵ�����֤���źŵ�ȷ���ݡ����ֹ�դ��λ������������ʽ�ṹ������ֻ�ܲ������Ź�դ��״�����λ�ơ���ʵ���ϣ�����������Ĺ켣�����������Ź�դ��״�ķ������Դ�ͳ�ķ��ʽ��դ��λ����������Ӧ�Բ�ͬ����λ�ƵIJ������������漰һ���ܹ�����...
�й���ѧԺ��������̨�Ͼ����Ĺ�ѧ�����о���������ڹ�ѧ�Ⱥ�����ƴ�Ӿ����Ե�������·�����ͼ��
��ѧ�Ⱥ����ԭ�� ���Ĺ�ѧ���� ��ѧƴ�Ӿ��漼��
2021/8/12
���ڣ��й���ѧԺ��������̨�Ͼ����Ĺ�ѧ�����о������о�Ա����Ŷ������һ�ֻ��ڹ�ѧ�Ⱥ����ԭ����ƴ�ӹ����Ե��ⷽ�����÷������Դ�ԭ���ϱ�����Ư��ʱƯ���������������ţ������Լ�ƴ�ӹ�����̣�ʵʱ��������Ӿ���ľ���λ��������о��ɹ���Ϊ�������·����ڡ���ѧѧ�����ϡ�
�п�Ժ�������������Ͽ�ѧ�����о��������Ͼ�������ѧ���п�Ժ������������������ѧ���Ͼ���ѧ�ȵ�λ������������һ������̼���ܡ����ӵ�����̬�˹��Ӿ���������������գ��óɹ��ԡ���������̬�Ӿ�ϵͳ�����Գ���������������С�Ϊ�⣬�ڡ���Ȼ��ͨѶ�����߷������˹��Ӿ�ϵͳ�Ŀ�������Ҫ���´����˹�ϵͳ������ԡ������Ժ���Ӧ�ԣ���Ҫͨ����Ч�ʼ���ͼ��ķ�ʽ��ʵ������Ŀǰ���˹��Ӿ�ϵͳ�������ô�ͳ�Ļ���������...

���ڣ��й���ѧԺ�����о���������Ա����ڶ�ҵ�λ�Ŀ����ŶӺ�����������һ������̼����-���ӵ�����̬�˹��Ӿ�оƬ���о��ɹ���3��19���ڡ���Ȼ��ͨѶ����Nature Communications�����߷�������Ϊ����������̬�Ӿ�ϵͳ�����Գ���������������У�A flexible ultrasensitive optoelectronic sensor array for neuromorphic...
�������ṩ��һ�ֶ������״ﳵ��Ŀ��ʶ���������ķ�ײװ�ã������״�Ϊ�������״�÷�����������ȡ�������״��̽�����ݣ�̽�����ݰ�����������ɨ�������ɵ��Ƶ��������ݣ��������ɵ��Ƶ��������ݣ�ͨ������դ���ͼ�����ɵ��ƽ��о��࣬�Խ����ɵ��Ʒ�Ϊ����һ���ࣻ�������һ������ġ�ÿ��ɨ���ĵ��Ƶ������������Ϊ�߶Σ���ȡÿ�������ÿ��ɨ�����������Լ���ȡ�߶ε�������������ȡ��������ͨ������ѧϰ...
�Ĵ�����Ϥ���ѧ��ǰ��������˵����У�����Ŷӽ��˹����ܼ���������������ϣ����Ƴ�һ�����͡����Ӳ�ǰ����������ͨ���Ժ��ǡ���˸������������������������������ػ���Զ������̫��ϵ�����ǣ��³�ϵ�����ǣ����쵼���о���Ϥ���ѧ��ʿ���ɱȡ�ŵ��˹����˵��ĿǰҪʶ���������ϵ�е������ǣ���Ҫ�취�Dz�����Щ��ϵ�еĺ�������й��ɵر䰵���������ȱ仯����Χ��������ת�������ڵ���ɵġ�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...