
搜索结果: 1-15 共查到“知识库 工学 实时”相关记录1494条 . 查询时间(0.556 秒)
相关滤波算法(Correlation filter,CF)已广泛应用于无人机目标跟踪.然而,受无人机(Unmanned aerial vehicle,UAV)平台本身计算性能的制约,现有的无人机相关滤波跟踪算法大都仅采用手工特征来描述目标的外观,难以获得目标的全面语义信息.并且这些跟踪算法仅能较好地进行光照条件良好场景下的跟踪,而在跟踪夜间场景下的目标时性能严重下降。
将全息干涉技术与高速摄影结合,研制成高速实时全息干涉摄影装置,用以研究火药燃烧场、复合推进剂的稳态燃烧及固体火箭推进剂在高压氮气下的燃烧等。可观察到燃烧表面状态、火焰结构、温度分布与变化及燃烧中物质的分布和运动等。用每秒8000幅拍摄了点火药的起燃过程,清晰地记录了起燃位置和火药传播过程。

轨道衡工作状态在线实时监测系统在火电厂中的应用(图)
工作状态 在线监测 自动化采集 轨道衡监测
2023/5/16
“轨道衡工作状态在线实时监测系统”立足电厂企业铁路大批量运煤正常安全运行接卸实际,瞄准迫切需要解决的大批量运煤正常运行问题而开发的一套轨道衡工作状态在线实时监测系统,轨道衡工作状态在线实时监测系统兼具先进性、实用性、经济性,具有较高推广应用价值。此系统采用windows客户端软件和多设备监测装置硬件相结合发明的自动化采集监测技术,使轨道衡设备的运行达到自动化、智能化。
《温度实时监测装置在对外供热管网的应用》(图)
供热 温度实时监测 数字传输 效益
2023/6/19
随着工业化进程和工业园区的兴起,集中供热的需求量也在逐年上升,目前大部分园区内企业分布不集中,且蒸汽大多以长距离管道输送;但因地理、交通、建筑等因素,园区内蒸汽管网设计安装有地埋、架空、过河等地段,管道敷设路径复杂,靠山边坡及水渠段等不利运行、检修人员进行日常巡检及维护工作。寻求数字化的帮助,利用温度实时监测系统可以有效的提高热网运营的经济性和可靠性。
电力系统的瞬时性故障易产生暂态衰减直流分量DDC(decaying DC component)、高次谐波等干扰信号,有效滤除干扰信号以实现电压基波幅值相位的快速、准确检测,对于提升电能质量非常重要。为此,基于三相畸变电压信号的周期性和半波对称性,提出在abc坐标系下对畸变电压分别延迟半周期、全周期采样,实现DDC分量的单位周期检测。其次,针对同时含有DDC与高次谐波的畸变信号,在dq旋转坐标系下将...
瞬发中子测井的铀矿井眼实时校正方法研究
铀矿测井 瞬发中子 井径 校正方法
2022/3/22
在铀资源勘查过程中,相比与传统自然γ测井,铀裂变瞬发中子测井以其“直接测铀”的优势节约了勘探成本,提高了探测效率。但该技术受井眼条件对源中子的慢化与吸收影响较大,必须进行现场校正,才能保证其解释结果的有效性。本文通过蒙特卡罗模拟手段,铀裂变瞬发中子测井探管内采用14MeV的氘-氚(D-T)脉冲中子源,源距为30cm,中子探测器均为3He气体探测器,γ探测器为LaBr3(Ce)探测器。通过模拟井径为...
近年来,随着海洋资源的不断开发与海洋工程的全球化推进,深海起重机得到了广泛应用,其控制问题也引起研究人员的极大关注.在深海作业环境中,由于吊运过程受到水流作用力的影响,负载摆动幅度增大,系统状态量间非线性耦合关系增强,使系统控制难度加大.为此,本文针对深海起重机系统提出了一种实时轨迹规划方法.具体而言,通过分析系统动力学特性和状态变量之间复杂的耦合关系,提出了一种实时规划轨迹的方法,并从理论上证明...
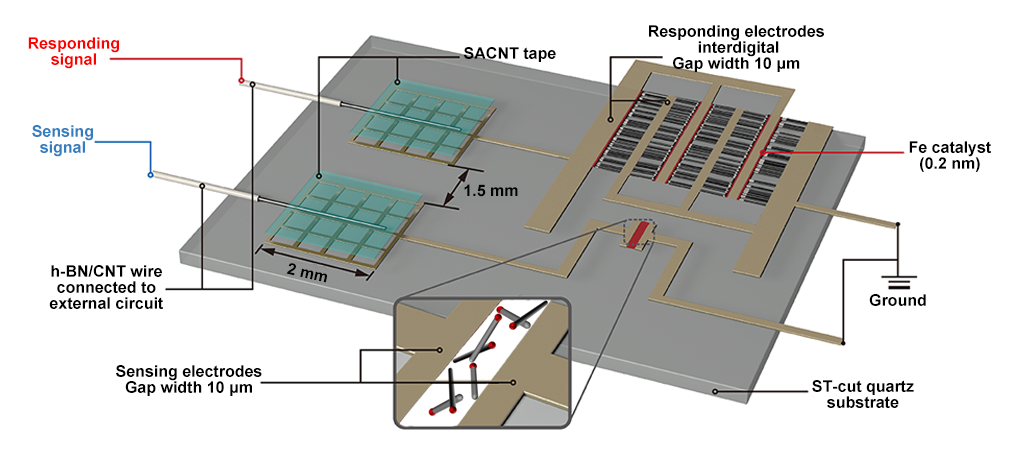
低维异质结材料由于其原子级平滑的表面和内界面,在纳米电子学中扮演着重要角色。传统制备异质结的方法,以在生长过程中控制生长参数的变化为主,如改变温度、气源等。然而,由于对生长参数分布的控制不够充分及纳米尺度下的热力学涨落等因素,通过预设条件的开环控制方法难以对异质结的位置、结构等做出精确控制。过去的十数年内,尽管研究者们对低维材料的生长机理做了细致的研究,但鲜有对生长过程进行原位监测和即时反馈方面的...
轻轨作为城市公共交通系统的重要组成部分,对其实现智能化的管理势在必行.针对城市轻轨定位系统要求精度高、实时强且易于安装等特点,本文提出一种基于全局−局部场景特征与关键帧检索的定位方法.该方法在语义信息的指导下,从单目相机获取的参考帧中提取区别性高的区域作为关键区域。
本文以实现移动小型智能化系统的实时自主定位为目标,针对激光里程计误差累计大,旋转估计不稳定,以及观测信息利用不充分等问题,提出一种LiDAR/IMU紧耦合的实时定位方法―Inertial-LOAM.数据预处理部分,对IMU数据预积分,降低优化变量维度,并为点云畸变校正提供参考.提出一种基于角度图像的快速点云分割方法,筛选结构性显著的点作为特征点,降低点云规模,保证激光里程计的效率。
基于区块自适应特征融合的图像实时语义分割
深度学习 实时语义分割网络 区块自适应特征融合 跳跃连接结构
2024/1/23
近年来结合深度学习的图像语义分割方法日益发展,并在机器人、自动驾驶等领域中得到应用.本文提出一种基于区块自适应特征融合(Block adaptive feature fusion,BAFF)的实时语义分割算法,该算法在轻量卷积网络架构上,对前后文特征进行分区块自适应加权融合,有效提高了实时语义分割精度.首先,分析卷积网络层间分割特征的感受野对分割结果的影响,并在跳跃连接结构(SkipNet)上提出...