
搜索结果: 1-2 共查到“机器人控制 Delta”相关记录2条 . 查询时间(0.078 秒)
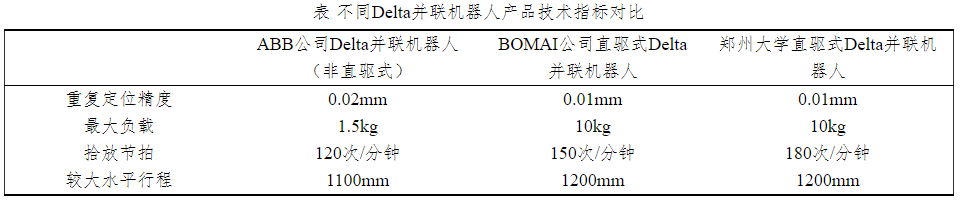
近日,河南省特聘教授司纪凯带领郑州大学电气与信息工程学院“先进电磁驱动与控制研究团队”,在郑州市协同创新重大专项“机器人驱动智能化包装生产线及搬运码垛系统研发”资助下,自主研发了系列化新型直驱式Delta并联机器人,在其直驱技术方面取得重大突破。
