
搜索结果: 1-15 共查到“工学 仿生”相关记录693条 . 查询时间(0.143 秒)

为抢抓人工智能发展的重大战略机遇,我国在《新一代人工智能发展规划》中明确指出要大力开展具有成像功能的类脑视觉传感技术研究。神经形态类脑视觉硬件作为具有光信息感知、信息处理、信息存储、逻辑思维和判断功能的新型器件,是构建类脑视觉感知和实现超低功耗类脑存算的核心部件,在人工智能、机器视觉、智能家居、自动驾驶、工业检测、生物医学成像及智慧健康等领域呈现出巨大发展潜力。传统神经形态视觉系统通过将传感单元、...
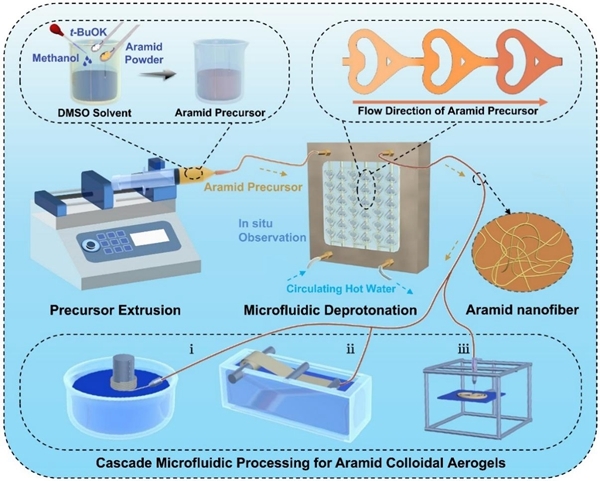
芳纶纳米纤维(ANFs)具有高强度、高模量、优异化学稳定性和耐高温等优点,在保温隔热、红外隐身、冲击防护、电磁屏蔽、能源存储等领域备受关注。但芳纶纳米纤维目前的制备存在耗时长、不连续且无法大规模生产等问题,限制其实际应用。鉴于此,中国科学院苏州纳米所张学同团队联合青岛科技大学马风国团队首先提出了微流控去质子化策略,利用心形微通道反应器实现了由芳纶粉末到芳纶纳米纤维(M-ANFs)的高效、连续、可视...

2024年3月18日南开大学教授孙宁做客CAA云讲座并作题为“仿生气动机器人动力学分析与智能控制”的报告。
2024年3月14日,林业工程学科生物质仿生智能研究团队在材料科学领域国际期刊《Nano Today》(中科院1区,IF=17.4)在线发表题为《用于可持续机械传感和能量收集装置的新兴纤维素材料:进展与前景》(Emerging cellulosic materials for sustainable mechanosensing and energy harvesting devices: Adv...
云南农业大学专利:一种三七种苗仿生挖掘铲
云南农业大学 三七种苗 仿生挖掘铲
2024/3/14
一种三七种苗仿生挖掘铲属农业机械技术领域,本实用新型铲尖为曲线BCD和直线DB的连接部分,是仿穿山甲前爪中趾尖端的轮廓曲线段;铲面为直线BD、曲线DE、直线EF和曲线FB的连接部分,其剖面曲线是仿穿山甲前爪中趾剖面的内轮廓曲线段;铲面凸起为铲面凸起长条,是仿穿山甲身躯鳞片上的纵向棱纹凸起;铲背的剖面曲线GA是关于仿穿山甲前爪中趾剖面的外轮廓曲线;铲尾的横截面是以线段EF为长、线段FG为宽所组成的长...
中国科学院重庆研究院发展出仿生“视听”光电探测器(图)
仿生 视听 光电探测器
2024/2/25
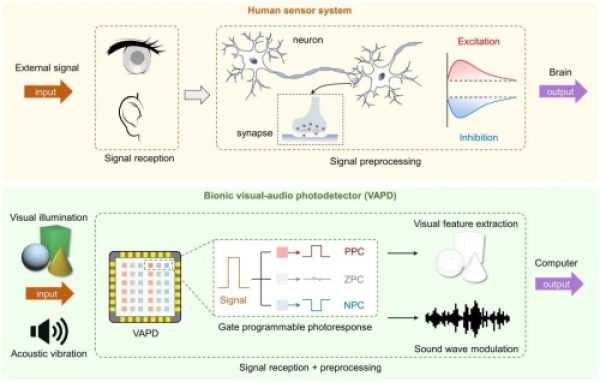
2024年2月23日,中国科学院重庆绿色智能技术研究院微纳制造与系统集成研究中心,在《科学进展》(Science Advances)上发表了题为《可片上探测和预处理的仿生视听光电探测器》(Bionic visual-audio photodetectors with in-sensor perception and preprocessing)的研究论文。该研究提出了仿生“视听”光电探测器,通过模...

中国科学技术大学构建综合性能提升的仿生复合玻璃(图)
综合性能 仿生复合玻璃 块体玻璃
2024/3/8
块体玻璃能够在透光的同时分隔内外部环境,是人们日常生活中不可或缺的重要结构材料。然而,玻璃的隔热性能较差,并且在冲击作用下容易发生灾难性破碎,抗冲击耗能有限。在外部温度变化和碎片撞击情况下,玻璃往往成为建筑物、交通工具以及电子设备中最薄弱的组件。
中国科学院合肥物质科学研究院专利:机器人手爪仿生指面柔性接触传感器阵列
中国科学院理化所在仿生限域膜催化流动化学合成方面取得新进展(图)
催化 流动化学 合成
2024/1/14
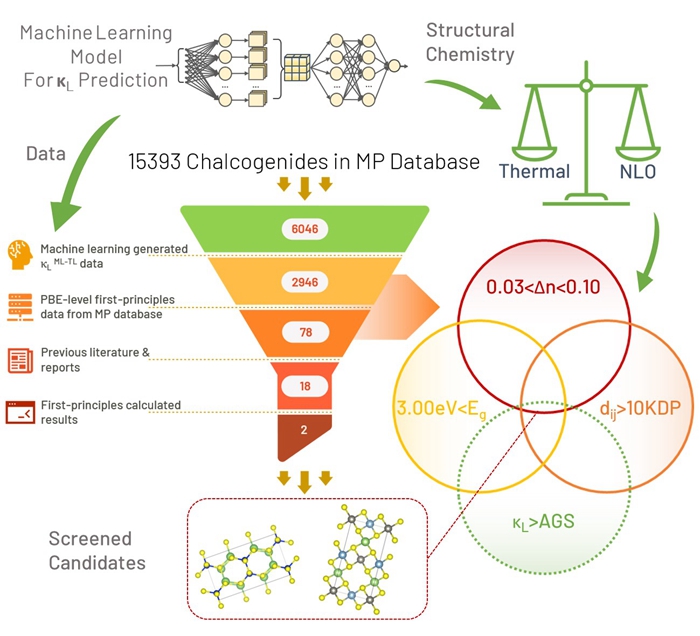
中红外非线性光学晶体能够通过频率转换产生中红外可调谐激光,在环保、医疗等方面有广泛的应用。目前,主要的商用红外非线性光学晶体有硫镓银、硒镓银和磷锗锌等,但由于其存在激光损伤阈值较低的缺陷,逐渐难以满足更加丰富的实际需求。因此,急需探索抗激光损伤性能更优异的中红外非线性光学材料。由于热损伤是激光损伤的重要组成部分,具有大热导率的非线性光学材料有可能具备高的激光伤阈值。然而,在非线性光学材料的探索中,...
河南农业大学专利:一种适用于麦田的智能仿生除草机
河南农业大学 麦田 智能仿生 除草机
2023/12/8
一种适用于麦田的智能仿生除草机,机架上安装有电动机,机架下方设有传动轴,电动机输出轴与传动轴链传动,除草轮通过链箱与传动轴连接,链箱与机架之间设有拉杆,传动轴链传动除草轮;所述除草轮上均匀分布有除草刀片,除草刀片的刀背上均匀分布有波纹凸起,波纹凸起垂直于除草刀片的长度方向;机架下方均匀设置有由步进电机驱动的智能除草爪,固定架上设有摄像头,摄像头及步进电机均连接控制器。与传统除草轮相比,仿生除草轮的...

中国科学院青岛能源所开发出基于稀土超富集植物的新型仿生吸附材料(图)
仿生吸附材料 稀土元素 工业维生素
2023/12/13
在碳达峰、碳中和的战略时代背景下,能源转型已经成为全球共识。稀土元素有“工业维生素”和“新材料之母”之称,作为高新技术发展的战略资源,随着科技的突破变得越来越重要。我国作为稀土出口大国,优化稀土资源绿色高效的综合利用,突破低浓度稀土回用的技术瓶颈,实现稀土行业的可持续发展已成为稀土矿产资源开发利用的重要课题。
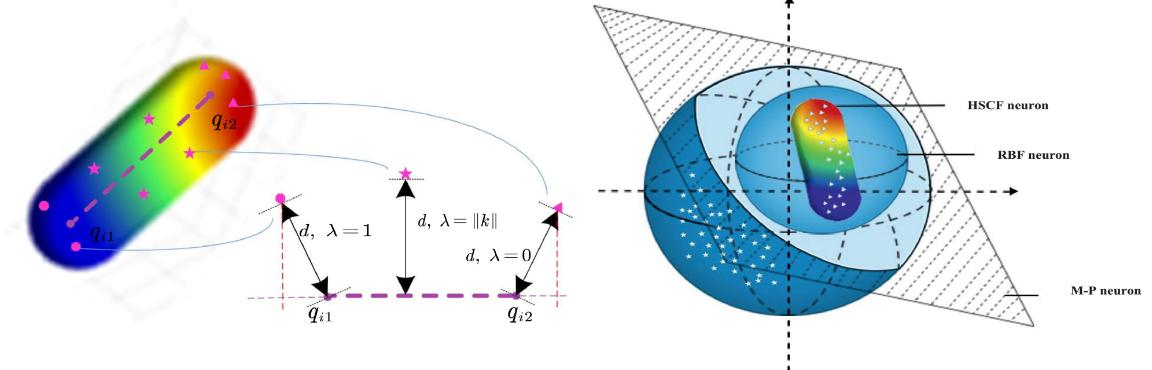
中国科学院半导体所在仿生覆盖式神经元模型及学习方法研究方面取得进展(图)
仿生 神经元模型 网络结构
2024/2/28
人工神经网络是模拟人脑神经活动的重要模式识别工具,受到了众多科学家和学者的关注。然而,近2023年来DNN的改进与优化工作主要集中于网络结构和损失函数的设计,神经元模型的发展一直非常有限。神经生物学和认知神经科学的研究表明,神经元的学习能力是生物神经系统完成学习和记忆任务的重要基础,这些机理可促使我们在神经元设计和优化方面进一步提高DNN的性能。
西北农林科技大学专利:水陆两栖型六足仿生运动机器人
西北农林科技大学 水陆两栖型 六足 仿生运动机器人
2023/11/24
本实用新型公开了水陆两栖型六足仿生运动机器人,包括主体控制模块、传感模块、腿部模块,所述主体控制模块包括主体外壳以及安装在主体外壳内部的控制主板,所述传感模块包括前置摄像头,所述前置摄像头安装在主体控制模块的主体外壳前侧,所述主体控制模块的主体外壳四周设有六个腿部模块,所述腿部模块均安装有螺旋桨。本实用新型不仅可以靠灵活的腿部适应复杂地型,还可以依靠脚尖部位安装的螺旋桨在水上行进,前置摄像头又可以...